UTS Mikroprosesor Soal 3
- Mengetahui proses pembuatan rangkaian sistem minimun dengan mikroprosessor 8086
- mengetahui cara bekerja sistem minimum rangkaian dengan mikroprosessor 8086
- Menyelsaikan soal
- 6116

- 6264

- LOGICSTATE










.jpg)




- RESISTOR
Resistor merupakan komponen elektronika dasar yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Resistor memiliki simbol seperti gambar dibawah ini :

Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :



Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
- IC 74LS138

Prinsip Kerja IC 74LS138:
Input:
- Tiga Input Alamat (A, B, C): IC ini memiliki tiga input alamat (A, B, C) yang menentukan output mana yang akan diaktifkan. Input ini adalah representasi biner 3-bit, sehingga dapat menghasilkan kombinasi dari 000 hingga 111 (total 8 kombinasi).
- Tiga Input Pengendali (G1, G2A, G2B):
- G1 (Enable) adalah input aktif tinggi, artinya IC hanya bekerja jika G1 diberi logika 1.
- G2A dan G2B adalah input aktif rendah (logika 0). IC hanya bekerja jika kedua pin ini diberi logika 0. Jika salah satu dari G2A atau G2B diberi logika 1, semua output akan tetap dalam keadaan tidak aktif (logika 1).
- Jadi, untuk membuat IC berfungsi, kondisi yang harus dipenuhi adalah G1 = 1, G2A = 0, dan G2B = 0.
Output:
- IC ini memiliki delapan output (Y0 hingga Y7). Pada setiap saat, hanya satu output yang akan aktif rendah (logika 0), tergantung pada nilai input biner yang diberikan pada pin alamat A, B, dan C.
- Output yang dipilih sesuai dengan kode biner input. Misalnya:
- Jika A = 0, B = 0, C = 0, maka Y0 akan menjadi aktif rendah (logika 0), dan Y1 hingga Y7 tetap dalam keadaan aktif tinggi (logika 1).
- Jika A = 0, B = 0, C = 1, maka Y1 akan menjadi aktif rendah, dan Y0 serta Y2-Y7 tetap aktif tinggi.
- Dan seterusnya hingga kombinasi A = 1, B = 1, C = 1, yang akan mengaktifkan Y7.
Fungsi Enable:
- Fungsi pengendali (G1, G2A, G2B) memungkinkan IC ini untuk diaktifkan atau dinonaktifkan secara eksternal. Jika IC dinonaktifkan, semua output akan berada dalam keadaan tidak aktif (logika 1) terlepas dari nilai input A, B, dan C.
Operasi Dekoder/Demultiplexer:
- Sebagai decoder, IC ini menerima input biner 3-bit dan menghasilkan satu output aktif rendah yang sesuai. Hal ini sering digunakan dalam sistem digital untuk memilih satu dari delapan perangkat atau memori.
- Sebagai demultiplexer, IC 74LS138 dapat digunakan untuk mendistribusikan satu sinyal input ke salah satu dari delapan saluran output tergantung pada kode input biner.

- 6116
IC memori 6116 merupakan salah satu RAM statik berkapasitas 16.384 bit atau 2 kbyte. IC 6116 mempunyai 8 jalur data (D0-D7) dan 11 jalur alamat (A0-A10). Untuk menulis data digunakan sinyal W (aktif LOW) dan untuk membaca data digunakan sinyal G (aktif LOW). Kaki E (aktif LOW) digunakan untuk mengijinkan memori menulis atau membaca data pada jalur data. Kaki 12 dihubungkan ke GND dan kaki 24 dihubungkan ke +5V.

-CS | -OE | -WE | Mode | Pin–pin I-O |
1 | X | X | Non aktif | High Z |
0 | 0 | 1 | Read | Out |
0 | 1 | 0 | Write | In |
- 6264

- LOGICSTATE



Prinsip kerja IC 74HC373
Prinsip kerja IC 74HC373 adalah berdasarkan prinsip latch D. Dalam latch D, data pada input (D0-D3) akan diteruskan ke output (Q0-Q3) hanya jika input enable (LE) aktif. Jika input enable (LE) tidak aktif, maka output (Q0-Q3) akan tetap mempertahankan nilainya.
Tabel kebenaran IC 74HC373
Berikut adalah tabel kebenaran IC 74HC373:
| Input | Output |
|---|---|
| LE | Q0 |
| 0 | 0 |
| 1 | D0 |
Penggunaan IC 74HC373
IC 74HC373 dapat digunakan untuk berbagai keperluan, antara lain:
- Menyimpan data digital
- Mengontrol peralatan elektronik
- Membangun rangkaian logika
Berikut adalah beberapa contoh penggunaan IC 74HC373:
- Dalam sebuah sistem penghitung, IC 74HC373 dapat digunakan untuk menyimpan data digital, seperti angka atau huruf.
- Dalam sebuah mesin pengukur, IC 74HC373 dapat digunakan untuk mengontrol peralatan elektronik, seperti motor atau lampu.
- Dalam sebuah rangkaian logika, IC 74HC373 dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
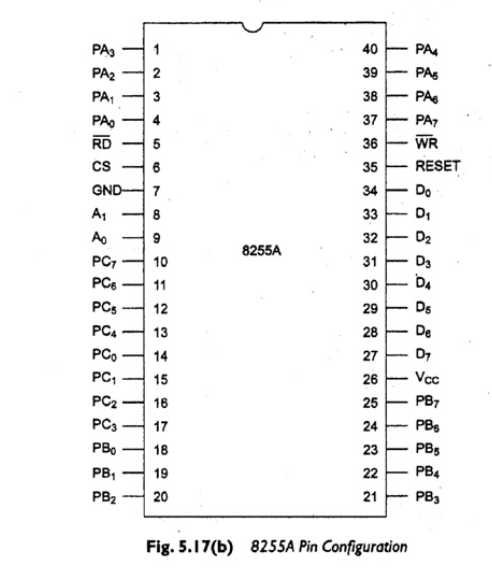
- IC 8255A
IC 8255A adalah IC programmable peripheral interface (PPI) yang dirancang untuk bekerja dengan tegangan sumber +5 volt DC. IC ini memiliki 24 pin, dengan 16 pin untuk input/output, empat pin untuk kontrol, dan empat pin untuk sumber daya.

Spesifikasi dari IC 8255A:
Arsitektur: 8 bitPort: 3 buah port 8 bitMode operasi: 3 modeFrekuensi operasi: 0 hingga 10 MHzKekuatan: 5 VProses pembuatan: NMOS
Konfigurasi PIN
Konfigurasi PIN :
Pin 1-4: VCC (tegangan suplai) Pin 5-6: GND (tegangan nol) Pin 7: RESET (reset) Pin 8: CS (chip select) Pin 9-10: A0-A1 (alamat bus)Pin 11-18: D0-D8 (data bus)Pin 19: INT (interrupt) Pin 20: MODE (mode) Pin 21: INH (input enable) Pin 22: OBF (output buffer full) Pin 23: IBF (input buffer full) Pin 24: WR (write) Pin 25: RD (read) Pin 27-30: PA0-PA7 (port A)Pin 31-36: PB0-PB7 (port B)Pin 37-40: PC0-PC7 (port C)
Prinsip kerja IC 8255A adalah berdasarkan prinsip PPI. Dalam PPI, data input dapat diubah menjadi data output, atau data input dapat digunakan untuk mengontrol peralatan elektronik.
Pada IC 8255A, data input/output dapat dikonfigurasi ke dalam berbagai mode, seperti:
- Mode Input: Mode Input memungkinkan data input dari peralatan elektronik untuk dibaca oleh mikroprosesor.
- Mode Output: Mode Output memungkinkan data output dari mikroprosesor untuk ditulis ke peralatan elektronik.
- Mode Bidirectional: Mode Bidirectional memungkinkan data input/output dikonfigurasikan secara dinamis.
Penggunaan IC 8255A
IC 8255A dapat digunakan untuk berbagai keperluan, antara lain:
- Membangun rangkaian input/output
- Mengontrol peralatan elektronik
- Membangun rangkaian logika
Berikut adalah beberapa contoh penggunaan IC 8255A:
- Dalam sebuah sistem penghitung, IC 8255A dapat digunakan untuk membaca data dari sensor atau mengontrol peralatan elektronik.
- Dalam sebuah mesin pengukur, IC 8255A dapat digunakan untuk menampilkan data ke layar atau mengontrol motor.
- Dalam sebuah rangkaian logika, IC 8255A dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
- Bahasa Mesin dan Bahasa Assembly
Prinsip kerja IC 8255A adalah berdasarkan prinsip PPI. Dalam PPI, data input dapat diubah menjadi data output, atau data input dapat digunakan untuk mengontrol peralatan elektronik.
Pada IC 8255A, data input/output dapat dikonfigurasi ke dalam berbagai mode, seperti:
- Mode Input: Mode Input memungkinkan data input dari peralatan elektronik untuk dibaca oleh mikroprosesor.
- Mode Output: Mode Output memungkinkan data output dari mikroprosesor untuk ditulis ke peralatan elektronik.
- Mode Bidirectional: Mode Bidirectional memungkinkan data input/output dikonfigurasikan secara dinamis.
Penggunaan IC 8255A
IC 8255A dapat digunakan untuk berbagai keperluan, antara lain:
- Membangun rangkaian input/output
- Mengontrol peralatan elektronik
- Membangun rangkaian logika
Berikut adalah beberapa contoh penggunaan IC 8255A:
- Dalam sebuah sistem penghitung, IC 8255A dapat digunakan untuk membaca data dari sensor atau mengontrol peralatan elektronik.
- Dalam sebuah mesin pengukur, IC 8255A dapat digunakan untuk menampilkan data ke layar atau mengontrol motor.
- Dalam sebuah rangkaian logika, IC 8255A dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
Instruksi yang difetch dari memori untuk kemudian diseksekusi oleh mikroprosesor berformat biner (kombinasi angka 0 dan 1), yang disebut bahasa mesin. Sebagai contoh, perintah untuk memindahkan data dalam register BX ke register CX adalah 10001011 11001011 ($8B CB), sedangkan bahasa mesin untuk menjumlahkan data dalam register AL dengan angka 7 adalah 00000100 00000111 ($04 07), dan perintah membaca dari port 5 diberikan dengan 11100100 00000101 ($E4 05).Seperti terlihat pada ketiga contoh di atas, bahasa mesin tidak mudah untuk dimengerti dan dihapalkan oleh seorang programer, apalagi jumlah instruksi yang tersedia berkisar ribuan perintah. Di samping itu, akan mudah sekali terjadi kesalahan ketika menuliskan angka-angka biner yang tersusun atas angka 0 dan 1 yang banyak sekali. Oleh karena itu biasanya kita tidak memprogram komputer langsung dalam bahasa mesin, namun dalam bahasa assembly.
Dalam bahasa assembly, setiap instruksi diberi kata (mnemonic) yang sesuai dengan maksud perintah itu, sehingga dapat membantu pemrogram dalam mengingat instruksi kepada mikroprosesor tersebut. Kata yang dipakai biasanya berupa singkatan atau beberapa huruf awal dari kata dalam bahasa Inggris untuk perintah tersebut. Misalnya, mnemonic untuk perintah penjumlahan adalah ADD, untuk perintah pengurangan adalah SUB (dari kata subtract), dan untuk memindahkan data( ) 4 dari suatu register atau memori ke lokasi lain adalah MOV (dari kata move). Sebagian besar instruksi terdiri atas mnemonic dan operand yang merupakan parameter dari instruksi tersebut, yang dituliskan di belakang mnemonic tersebut. Contoh bahasa assembly dari perintah-perintah dengan bahasa mesin di atas diberikan dalam Tabel

Dalam bahasa assembly, setiap instruksi diberi kata (mnemonic) yang sesuai dengan maksud perintah itu, sehingga dapat membantu pemrogram dalam mengingat instruksi kepada mikroprosesor tersebut. Kata yang dipakai biasanya berupa singkatan atau beberapa huruf awal dari kata dalam bahasa Inggris untuk perintah tersebut. Misalnya, mnemonic untuk perintah penjumlahan adalah ADD, untuk perintah pengurangan adalah SUB (dari kata subtract), dan untuk memindahkan data( ) 4 dari suatu register atau memori ke lokasi lain adalah MOV (dari kata move). Sebagian besar instruksi terdiri atas mnemonic dan operand yang merupakan parameter dari instruksi tersebut, yang dituliskan di belakang mnemonic tersebut. Contoh bahasa assembly dari perintah-perintah dengan bahasa mesin di atas diberikan dalam Tabel

- Pin Diagram Mikroprosessor 8086

Mikroprosesor 8086 mempunyai 40 kaki (pin) yang masing-masing digunakan untuk melewatkan sinyal tertentu. Setiap pin sinyal diberi nama berupa mnemonic yang sesuai dengan fungsinya. Sistem komputer 8086 mempunyai bus data selebar 16 bit dan bus alamat selebar 20 bit, sehingga dapat mengalamati memori sampai dengan 220 atau 1 Mb. Untuk menghemat jumlah pin, maka antara pin untuk data dan pin untuk alamat digabungkan dengan diberi nama AD0-AD15 (dari kata address data), sedangkan 4 bit alamat sisanya diberi nama A16-A19 (pin-pin ini juga digunakan untuk sinyal status).
Terdapat juga pin-pin untuk catu daya yang disuplaikan, yaitu VCC dan GND, masing-masing untuk tegangan catu daya dan pentanahan. Untuk dapat bekerja, selain membutuhkan catu daya, mikroprosesor 8086 juga memerlukan sinyal detak (clock) secara eksternal dengan frekuensi sampai 10 MHz. Sinyal clock ini dilewatkan ke pin CLK yang ada pada kaki nomor 19.
Pin-pin lainnya digunakan untuk sinyal kendali. Mikroprosesor 8086 dapat digunakan dalam 2 mode, minimum dan maksimum, yang masing-masing menggunakan pin kendali secara berbeda. Mode ini ditentukan dengan memberi nilai pada pin MXMN/ ( ) 1 , nilai 1 (dihubungkan dengan Vcc) untuk mode minimum dan nilai 0 (ditanahkan) untuk mode maksimum. Kebanyakan aplikasi menggunakan mode minimum. Pada mode ini, nama pin yang dipakai pada kaki nomor 24 sampai dengan 31 adalah yang berada di dalam tanda kurung (sebelah kanan)
Sinyal RESET digunakan untuk memerintah mikroprosesor agar melakukan inisialisasi dengan cara memberi nilai 0 pada register DS, SS, ES, IP, dan flag; serta nilai $FFFF untuk CS( ) 2 . Pin INTR dan NMI digunakan untuk menginterupsi kerja mikroprosesor. Jika ada sinyal pada kedua pin itu, maka mikroprossor akan menghentikan eksekusi program yang sedang dijalankannya, kemudian menjalankan subrutin sesuai yang dikehendaki, dan setelah selesai kembali ke tempat semula di mana program diinterupsi. Sinyal INTR (interrupt) berupa permintaan untuk melakukan interupsi yang dapat dianulir /tidak dipenuhi jika flag IF direset, sedangkan sinyal NMI (non maskable interrupt) tidak dapat ditutup/ditolak, artinya interupsi harus dilakukan. Pin INTA (interrupt acknowledge) digunakan oleh mikroprosesor untuk menjawab bahwa permintaan interupsi dari sinyal INTR dapat diterima/dijalankan
Pin IO M/ (memory/IO), RD (read), dan WR (write) digunakan untuk mengendalikan memori dan port pada saat pemindahan data. Sinyal IO M/ digunakan untuk memilih apakah memori atau port yang akan diakses oleh mikroprosesor. Jika hendak menghubungi memori, maka mikroprosesor memberi nilai tinggi (1) pada sinyal ini dan jika port yang hendak diakses maka sinyal ini diberi nilai rendah (0). Sinyal RD akan diaktifkan (bernilai rendah) jika operasi yang dilakukan adalah membaca, yaitu transfer data dari memori/port ke mikroprosesor. Sementara sinyal WR digunakan untuk menulis, tranfer data dari mikroprosesor ke memori/port, jika aktif. Sinyal-sinyal lain adalah R DT/ (data transmit/receive), DEN (data enable), ALE (address latch enable), dan BHE (bus high enable) yang akan dibahas kemudian.

Terdapat juga pin-pin untuk catu daya yang disuplaikan, yaitu VCC dan GND, masing-masing untuk tegangan catu daya dan pentanahan. Untuk dapat bekerja, selain membutuhkan catu daya, mikroprosesor 8086 juga memerlukan sinyal detak (clock) secara eksternal dengan frekuensi sampai 10 MHz. Sinyal clock ini dilewatkan ke pin CLK yang ada pada kaki nomor 19.
Pin-pin lainnya digunakan untuk sinyal kendali. Mikroprosesor 8086 dapat digunakan dalam 2 mode, minimum dan maksimum, yang masing-masing menggunakan pin kendali secara berbeda. Mode ini ditentukan dengan memberi nilai pada pin MXMN/ ( ) 1 , nilai 1 (dihubungkan dengan Vcc) untuk mode minimum dan nilai 0 (ditanahkan) untuk mode maksimum. Kebanyakan aplikasi menggunakan mode minimum. Pada mode ini, nama pin yang dipakai pada kaki nomor 24 sampai dengan 31 adalah yang berada di dalam tanda kurung (sebelah kanan)
Sinyal RESET digunakan untuk memerintah mikroprosesor agar melakukan inisialisasi dengan cara memberi nilai 0 pada register DS, SS, ES, IP, dan flag; serta nilai $FFFF untuk CS( ) 2 . Pin INTR dan NMI digunakan untuk menginterupsi kerja mikroprosesor. Jika ada sinyal pada kedua pin itu, maka mikroprossor akan menghentikan eksekusi program yang sedang dijalankannya, kemudian menjalankan subrutin sesuai yang dikehendaki, dan setelah selesai kembali ke tempat semula di mana program diinterupsi. Sinyal INTR (interrupt) berupa permintaan untuk melakukan interupsi yang dapat dianulir /tidak dipenuhi jika flag IF direset, sedangkan sinyal NMI (non maskable interrupt) tidak dapat ditutup/ditolak, artinya interupsi harus dilakukan. Pin INTA (interrupt acknowledge) digunakan oleh mikroprosesor untuk menjawab bahwa permintaan interupsi dari sinyal INTR dapat diterima/dijalankan
Pin IO M/ (memory/IO), RD (read), dan WR (write) digunakan untuk mengendalikan memori dan port pada saat pemindahan data. Sinyal IO M/ digunakan untuk memilih apakah memori atau port yang akan diakses oleh mikroprosesor. Jika hendak menghubungi memori, maka mikroprosesor memberi nilai tinggi (1) pada sinyal ini dan jika port yang hendak diakses maka sinyal ini diberi nilai rendah (0). Sinyal RD akan diaktifkan (bernilai rendah) jika operasi yang dilakukan adalah membaca, yaitu transfer data dari memori/port ke mikroprosesor. Sementara sinyal WR digunakan untuk menulis, tranfer data dari mikroprosesor ke memori/port, jika aktif. Sinyal-sinyal lain adalah R DT/ (data transmit/receive), DEN (data enable), ALE (address latch enable), dan BHE (bus high enable) yang akan dibahas kemudian.
- 4. Motor DC

Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
- HeaterHeater, dalam konteks umum, merujuk pada perangkat yang dirancang untuk menghasilkan panas dan meningkatkan suhu dalam suatu ruangan atau sistem tertentu. Biasanya menggunakan elemen pemanas, seperti kawat pemanas atau elemen pemanas keramik, heater mengubah energi listrik menjadi panas yang dipancarkan ke sekitarnya. Penggunaan heater dapat bervariasi dari pemanas ruangan untuk kenyamanan termal di rumah atau kantor hingga aplikasi industri yang memerlukan kontrol suhu yang ketat. Selain itu, heater juga dapat menjadi bagian dari berbagai perangkat, termasuk peralatan laboratorium, mesin, atau alat elektronik yang memerlukan suhu tertentu untuk beroperasi secara optimal.
 Prinsip KerjaPrinsip kerja heater didasarkan pada konsep transformasi energi listrik menjadi panas. Biasanya, heater dilengkapi dengan elemen pemanas, seperti kawat pemanas atau elemen pemanas keramik, yang memiliki resistansi listrik tinggi. Ketika arus listrik mengalir melalui elemen pemanas ini, resistansi menyebabkan pemanasan, dan energi listrik diubah menjadi panas. Panas yang dihasilkan kemudian dipancarkan ke lingkungan sekitarnya, meningkatkan suhu di sekitar heater. Prinsip ini digunakan baik dalam pemanas ruangan konvensional maupun dalam berbagai aplikasi industri di mana kontrol suhu adalah faktor kritis. Beberapa heater juga dilengkapi dengan sensor suhu atau termostat untuk memantau dan mengatur suhu, memastikan kenyamanan atau kestabilan suhu yang diinginkan sesuai dengan kebutuhan pengguna atau spesifikasi aplikasi.
Prinsip KerjaPrinsip kerja heater didasarkan pada konsep transformasi energi listrik menjadi panas. Biasanya, heater dilengkapi dengan elemen pemanas, seperti kawat pemanas atau elemen pemanas keramik, yang memiliki resistansi listrik tinggi. Ketika arus listrik mengalir melalui elemen pemanas ini, resistansi menyebabkan pemanasan, dan energi listrik diubah menjadi panas. Panas yang dihasilkan kemudian dipancarkan ke lingkungan sekitarnya, meningkatkan suhu di sekitar heater. Prinsip ini digunakan baik dalam pemanas ruangan konvensional maupun dalam berbagai aplikasi industri di mana kontrol suhu adalah faktor kritis. Beberapa heater juga dilengkapi dengan sensor suhu atau termostat untuk memantau dan mengatur suhu, memastikan kenyamanan atau kestabilan suhu yang diinginkan sesuai dengan kebutuhan pengguna atau spesifikasi aplikasi. - 7 Segment Anoda
Seven segment merupakan bagian-bagian yang digunakan untuk menampilkan angka atau bilangan decimal. Seven segment tersebut terbagi menjadi 7 batang LED yang disusun membentuk angka 8 dengan menggunakan huruf a-f yang disebut DOT MATRIKS. Setiap segment ini terdiri dari 1 atau 2 LED (Light Emitting Dioda). Seven segment bisa menunjukan angka-angka desimal serta beberapa bentuk tertentu melalui gabungan aktif atau tidaknya LED penyususnan dalam seven segment.
Supaya memudahkan penggunaannnya biasanya memakai sebuah sebuah seven segment driver yang akan mengatur aktif atau tidaknya led-led dalam seven segment sesuai dengan inputan biner yang diberikan. Bentuk tampilan modern disusun sebagai metode 7 bagian atau dot matriks. Jenis tersebut sama dengan namanya, menggunakan sistem tujuh batang led yang dilapis membentuk angka 8 seperti yang ditunjukkan pada gambar di atas. Huruf yang dilihatkan dalam gambar itu ditetapkan untuk menandai bagian-bagian tersebut.
Dengan menyalakan beberapa segmen yang sesuai, akan dapat diperagakan digit-digit dari 0 sampai 9, dan juga bentuk huruf A sampai F (dimodifikasi). Sinyal input dari switches tidak dapat langsung dikirimkan ke peraga 7 bagian, sehingga harus menggunakan decoder BCD (Binary Code Decimal) ke 7 segmen sebagai antar muka. Decoder tersebut terbentuk dari pintu-pintu akal yang masukannya berbetuk digit BCD dan keluarannya berupa saluran-saluran untuk mengemudikan tampilan 7 segmen.

Tabel Pengaktifan Seven Segment Display








- Sensor Suhu LM35
- LM35, LM35A -> range pengukuran temperature -55ºC hingga +150ºC.
- LM35C, LM35CA -> range pengukuran temperature -40ºC hingga +110ºC.
- LM35D -> range pengukuran temperature 0ºC hingga +100ºC.
- Rentang suhu yang jauh, antara -55 sampai +150ºC
- Low self-heating, sebesar 0.08 ºC
- Beroperasi pada tegangan 4 sampai 30 V
- Tidak memerlukan pengkondisian sinyal
- Membutuhkan tegangan untuk beroperasi.


IC LM 35 ini tidak memerlukan pengkalibrasian atau penyetelan dari luar karena ketelitiannya sampai lebih kurang seperempat derajat celcius pada temperature ruang. Jangka sensor mulai dari – 55°C sampai dengan 150°C, IC LM35 penggunaannya sangat mudah, difungsikan sebagai kontrol dari indicator tampilan catu daya terbelah. IC LM 35 dapat dialiri arus 60 μ A dari supplay sehingga panas yang ditimbulkan sendiri sangat rendah kurang dari 0 ° C di dalam suhu ruangan. Untuk mendeteksi suhu digunakan sebuah sensor suhu LM35 yang dapat dikalibrasikan langsung dalam C (celcius), LM35 ini difungsikan sebagai basic temperature sensor.




- Sensor HIH-5030



Membuka Proteus dan Membuat Proyek Baru:
- Buka software Proteus dan buat proyek baru. Beri nama proyek sesuai dengan kebutuhan.
Menambahkan Komponen ke Skema:
- Cari dan tambahkan komponen-komponen seperti memori (RAM atau ROM), decoder, mikroprosesor, saklar, dan LED dari library komponen Proteus.
- Letakkan komponen-komponen tersebut di skema proyek.
Menghubungkan Komponen:
- Hubungkan pin output dari mikrokontroler ke pin input dari decoder memori.
- Hubungkan output dari decoder ke input alamat dari memori.
- Pasangkan saklar ke pin data input memori jika diperlukan untuk input manual.
- Hubungkan LED ke output data memori untuk indikasi visual.
Mengatur Konfigurasi Memori dan Decoder:
- Konfigurasikan memori dengan menentukan ukuran dan tipe (misalnya, RAM atau ROM).
- Atur decoder memori untuk menerima input alamat dan memilih lokasi memori yang sesuai.
Menulis Program (Jika Menggunakan Mikrokontroler):
- Jika menggunakan mikrokontroler, tulis kode yang mengontrol pengiriman data dan alamat ke memori.
- Program ini mungkin ditulis dalam bahasa seperti Assembly atau C.
Menjalankan Simulasi:
- Setelah semua komponen terhubung dan program diunggah (jika ada), jalankan simulasi.
- Amati bagaimana data dikirim ke dan dari memori, dan bagaimana decoder memori memilih lokasi memori yang benar berdasarkan input alamat.
Menguji dan Mengamati Output:
- Gunakan saklar untuk memasukkan alamat atau data yang berbeda.
- Amati LED atau alat ukur lain untuk memastikan bahwa memori dan decoder berfungsi dengan benar sesuai dengan yang diharapkan.
Menganalisis Hasil Simulasi:
- Catat hasil simulasi dan analisis apakah perilaku rangkaian sesuai dengan teori yang diharapkan.
- Jika ada masalah, lakukan debugging untuk menemukan dan memperbaiki kesalahan.
5. Rangkaian Simulasi dan Prinsip Kerja [Kembali]

DATA SEGMENT
1. Definisi Port IC 8255 Pertama:
- `PORTA_1`: Alamat Port A IC 8255 pertama
(input).
- `PORTB_1`: Alamat Port B IC 8255 pertama
(output).
- `PORTC_1`: Alamat Port C IC 8255 pertama
(output).
- `PORT_CON_1`: Alamat Control
Register IC 8255 pertama.
2. Definisi Port IC 8255 Kedua dan Ketiga:
- Definisi alamat
port dan kontrol register untuk IC 8255 kedua dan ketiga dilakukan dengan cara
yang sama, yaitu `PORTA_2`, `PORTB_2`, `PORTC_2`, `PORT_CON_2` untuk IC kedua,
dan `PORTA_3`, `PORTB_3`, `PORTC_3`, `PORT_CON_3` untuk IC ketiga.
3. Definisi Alamat ROM dan RAM:
- `ROM_ADDR`:
Alamat ROM (8000H - FFFFH, A15 = 1).
- `RAM0_ADDR`:
Alamat RAM pertama (0000H - 07FFH, A14 = 0, A13 = 0).
- `RAM1_ADDR`:
Alamat RAM kedua (2000H - 3FFFH, A14 = 0, A13 = 1).
CODE SEGMENT
4. Inisialisasi Segmen Data:
- Memuat alamat
segmen data ke dalam register DS, agar dapat mengakses variabel yang telah
didefinisikan.
5. Konfigurasi IC 8255:
- IC 8255 Pertama:
- Mengatur Port A
sebagai input dan Port B serta C sebagai output (mode 0).
- IC 8255 Kedua dan
Ketiga:
- Konfigurasi
yang sama dilakukan untuk IC 8255 kedua dan ketiga, memastikan bahwa semua IC
siap untuk operasi input-output.
6. Inisialisasi
RAM dari ROM:
- RAM_0:
- Mengatur register SI untuk
menunjuk ke alamat ROM dan DI untuk RAM_0.
- Menggunakan
loop untuk menyalin 2KB data dari ROM ke RAM_0.
- RAM_1:
- Mengatur
register SI ke alamat ROM dan DI ke RAM_1.
- Menggunakan loop untuk menyalin 8KB data dari
ROM ke RAM_1.
7. Operasi
Input-Output pada IC 8255:
- Loop XX:
- Operasi
dilakukan berulang-ulang untuk setiap IC 8255.
- IC 8255 Pertama:
- Membaca data
dari Port A dan menulisnya ke Port C.
- Mengatur Port B
untuk menuliskan data default (0) dan kemudian mengubahnya menjadi 1 setelah
delay.
- Delay:
- Menggunakan
loop untuk menciptakan jeda waktu sebelum melanjutkan ke operasi berikutnya.
8. Operasi
Input-Output pada IC 8255 Kedua:
- Proses yang sama dilakukan untuk IC
8255 kedua, membaca data dari Port A dan menulis ke Port C, dengan pengaturan
yang sama untuk Port B.
9. Operasi
Input-Output pada IC 8255 Ketiga:
- Proses yang sama dilakukan untuk IC
8255 ketiga, membaca data dari Port A dan menulis ke Port C, serta mengatur
Port B.
10. Looping:
- Menggunakan `JMP
XX` untuk mengulangi proses input-output secara terus menerus, memungkinkan
sistem merespons perubahan input dari switch secara real-time.
Listing program

Komentar
Posting Komentar